
看護師、介護福祉士さんに知っていただきたい歩行の機能!巻き爪、タコ、ウオノメ予防

ヒトの基本的な活動である歩行。ヒトに元来備わる、歩行の機能をしっかりと発揮することで、巻爪やタコ、魚の目などの足のトラブルを予防することができます。リハビリや介護の現場でも「歩きたい」という希望を話される方がたくさんいます。
私たちは日常生活の中で無意識に歩く動作を行っていますが、どのようなメカニズムで歩いているのでしょうか。
実は、歩行には驚くべきメカニズムが働いています。今回は人体に元から備わっている歩行のメカニズムについてご紹介します。これを知ることで、普段どのようなことを意識して歩くと良いのか理解することができます。
一般的に、長時間楽に歩くためには、体力・足の筋力を鍛える必要があると思われがちですが、それ以上に歩行のメカニズムを上手く利用できるような体の状態を維持することの方が圧倒的に重要です。
以下に紹介する歩行のメカニズムが機能しなくなると、効率的な歩行が出来ず、少し歩くだけで疲れてしまいます。
人体は以下のような歩行のメカニズムがあるおかげで楽に長時間歩き続けることができ、さらにスマホを見ながら歩いたり、歩きながら二重の課題をこなしたりすることもできるのです。また、以下のあるき方を実践することで足のトラブルを未然に防ぐことが出来ます。
歩行の機能・メカニズム
歩行のメカニズムはたくさんあるのですが今回は物理的なメカニズム(倒立振り子モデル、ロッカーファンクション)を中心にご紹介します。
倒立振り子モデル
人間の体で一番重い部分はどこかご存知でしょうか。立っている時は骨盤の真ん中辺り(正確には第二仙骨のやや前方)に重心があります。
この一番重い骨盤を前に運ぶ動作こそが”歩行”であるといえます。骨盤を支える足が前に出され、骨盤を前に運ぶ様を「逆向きの(倒立)振り子」だとイメージしてください。
これは「倒立振り子モデル」といわれ、骨盤が落下する位置エネルギーを、体を前進させるための運動エネルギーに変換するために非常に重要なメカニズムです。
つまり、振り子の原理を利用して人体は効率よく体を前に運び、歩行しているのです。
倒立振り子モデルを利用し、足を前に出し、地面を後ろに蹴り、骨盤を前に出す。この動作を繰り返します。
これが歩行の推進力を生み出す基本的なメカニズムとなります。
倒立振り子モデルが成立するための条件として、以下の3つの回転軸がうまく機能していることが重要になります。
ロッカーファンクション
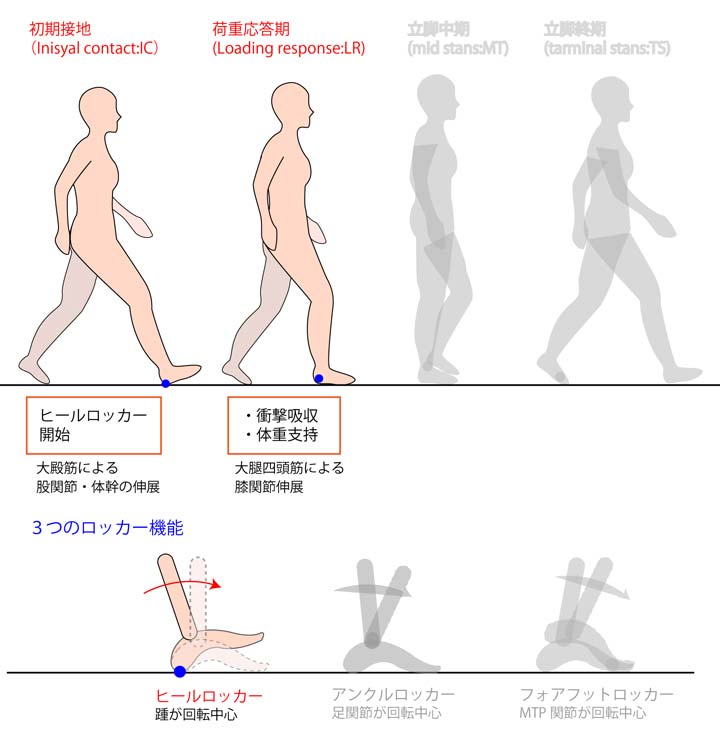
人が歩くとき、以下の三つの回転軸が機能することで体を前に進めていくことができます。この三つの回転軸の機能のことを”ロッカーファンクション”といいます。
ヒールロッカー
歩き出した時、まず初めに地面に踵が接地します。両足の踵の骨は、触っていただくとわかりますが、丸い形状をしています。接地したときに上から落ちてきた力(体重)が、踵の丸みによって前方向にスムーズに変換されます。この時のメカニズムをヒールロッカーといいます。
歩くときにできるだけ足を前に出し、踵から接地することで、効率よく体を前進させるための推進力を得ることができます。
このときに、骨盤の位置は上昇を始め、位置エネルギーを蓄えていきます。ヒールロッカーが機能するために重要な筋肉が大殿筋です。大殿筋とは、おしりの筋肉のことです。おしりにある大殿筋は、人体の筋肉の中でも太腿にある大腿四頭筋の次に大きい筋肉です。
足を前に降り出し、踵から接地する際に大殿筋が上手く機能していないと、股関節から体が前に曲がってしまい、ヒールロッカーが機能しません。
また、踵から接地するためには足先(つま先)を上げる必要があり、前脛骨筋という、足先をあげる筋肉が効果的に働いていることも重要です。
一般的に”すり足”と呼ばれる歩き方では、踵から接地せず、足底(足の裏)で接地してしまいます。この歩き方は推進力を得にくいため効率が悪く、長距離を歩くには不向きです。
アンクルロッカー
踵で起きるヒールロッカーの次に、足首で力の変換が行われます。踵を着いた後に足の裏に垂直に体重が乗った後、足首を支点にして前方向に力が変換されます。これをアンクルロッカーといいます。
このときに骨盤は最も高い位置にあり、高まった位置エネルギーが骨盤の前方への落下に伴い、運動エネルギーに変換されていきます。ブーツなど、足首の曲がる角度が制限されるような靴を履いていたり、捻挫や骨折などにより足首そのものに関節の可動域制限がある場合、このアンクルロッカーがうまく働かず前方への推進力が途中で止まってしまいます。
また、ふくらはぎの筋肉(下腿三頭筋)の柔軟性が低下していると足首の柔軟性が足りず、スムーズな推進力が得られません。
脳卒中などの運動麻痺により、下腿三頭筋が麻痺していたり、筋肉の緊張が異常状態にある方は、アンクルロッカーが機能せず、効率よく歩行することが難しくなってしまいます。その際は、足首に付ける装具を使用したりして対策を取ることもあります。
フォアフットロッカー
最後のロッカーは、フォアフットロッカーです。歩行の最後でつま先(フォアフット=足の前)で地面を後ろに蹴り出すときに機能します。
このとき、足部は自分の体よりも後ろにあります。骨盤は徐々に前に落下していき、位置エネルギーが前方へ推進するための運動エネルギーに変換されています。
足の指の付け根の丸みの部分で後に地面を蹴り出すことで、さらに強力に前方への推進力が得られます。
このとき、膝と足首がしっかりと曲がらないと体の後ろに足を持っていくことができず、フォアフットロッカーが働きません。
歩き方と巻爪、タコ、魚の目との関係性

上記の歩行のメカニズムを考慮した、効率の良い歩き方のポイントは以下になります。
- 背筋を伸ばす
- つま先を上げて踵から地面に接地させる
- 歩幅を大きくする(足を大きく前に出す)
- 後ろに地面を蹴るようにして歩く
なぜこれらのポイントが重要なのでしょうか。
まず、背筋が曲がっていると、足を前に大きく降り出すことができません。まずは背筋を伸ばして、体幹を垂直に保つことで足を大きく動かせるようにしておくことが大切です。
歩き方がすり足になってしまう方は、脊椎の圧迫骨折などの既往により、背骨が曲がってしまっていることが多いです。背中が曲がっていると、足を大きく前に出せないためにすり足になってしまう傾向があります。
足を前に大きく出し、踵が地面に接地することで上述のロッカーファンクションが働き、それ以降のアンクルロッカー、フォアフットロッカーと続いていきます。
つま先をしっかりと上げて、踵から地面に接地することも重要です。
また、歩幅を大きくすることで、足が体の後ろにしっかりと流れるようになるので、フォアフットロッカーも働きやすくなります。
できるだけ足首の動きを阻害するような靴を履かない(ブーツなど足首を覆う靴)ことでより効率良く歩行のメカニズムを使って歩くことができます。
巻爪や魚の目、タコなどができてしまうのは、これらの歩行の機能・メカニズムが上手く働かず、足部や足裏、足の指などの局部に過剰に圧が掛かってしまうことが常習化していしまっているためだといわれています。
まとめ

私たちが普段自然に行っている歩く動作は、多くのメカニズムによって補助されています。物理的には、倒立振り子モデルにより、人体の一番重たい部分である骨盤を前に運ぶ推進力が得られます。
また、足にはロッカーファンクションと呼ばれる機能があり、位置エネルギーが運動エネルギーへ効率的に変換されます。
- ヒールロッカー‥踵
- アンクルロッカー‥足首
- フォアフットロッカー‥足の指の付け根
それぞれの部位が支点となり、より効率的に体を前に推進させる機能が働きます。歩くときには、背筋を伸ばし、足を大きく前に振り出して、踵を接地するようにすると、これらのメカニズムが効果的に働きやすくなります。
踵ではなく、足底で接地する、すり足では前方への推進力が発生しにくくなり、疲れやすい歩き方になってしまいます。いつまでも健康に歩くためには、体力や筋力を鍛えることも大切ですが、歩行のメカニズムを効率的に利用できる体、関節の状態を維持しておくことも非常に重要です。
それらの歩行の機能を発揮できると、巻爪、タコ、魚の目などの足部トラブルを予防することができます。

